
编者按:一辆实现L4级自动驾驶功能的无人车无法离不开硬件技术的支持。也因此,自动驾驶是一项系统工程,除了出色的软件系统,也需要关注硬件设备在机械方面和电子方面的要求和挑战。
首先,给大家分享个小故事。
2004年,DARPA举办了第一届 “DARPA”挑战赛(无人车挑战赛)。根本没有一支参赛队伍完成这次比赛任务,这件事对来自斯坦福大学的Sebastian Thrun刺激很大。
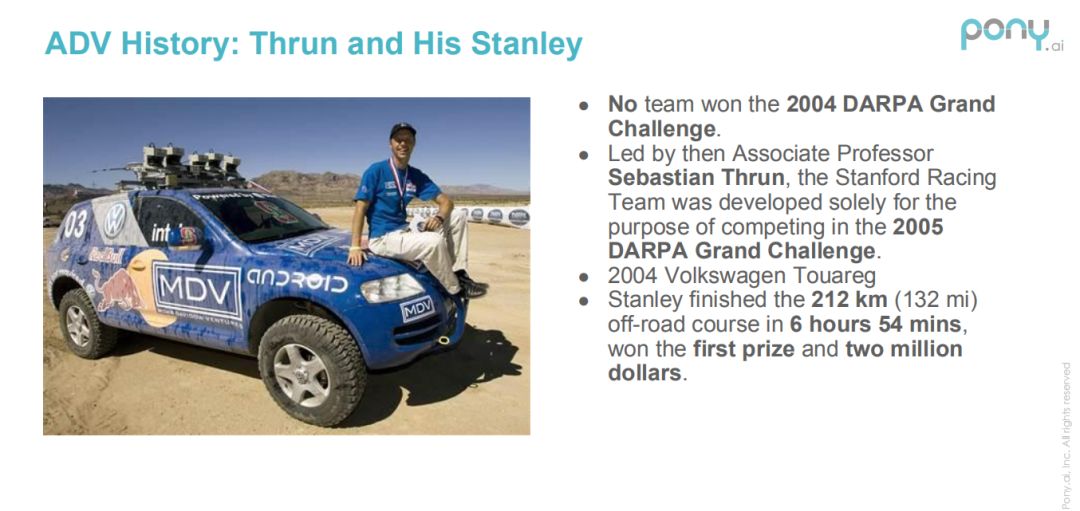
于是,他在2005年组建了自己的无人车队,并且成为这项挑战赛上的第一支完赛队伍,获得奖金200万美元。这笔奖金虽然巨额,但事实上Sebastian Thrun在这个项目的投入远远大于200万美金。
看到上面的照片,人们的第一反应,或者说最引人瞩目的,就是车顶上的一排传感器,当时采用的激光雷达传感器品牌是Sick(施克)。
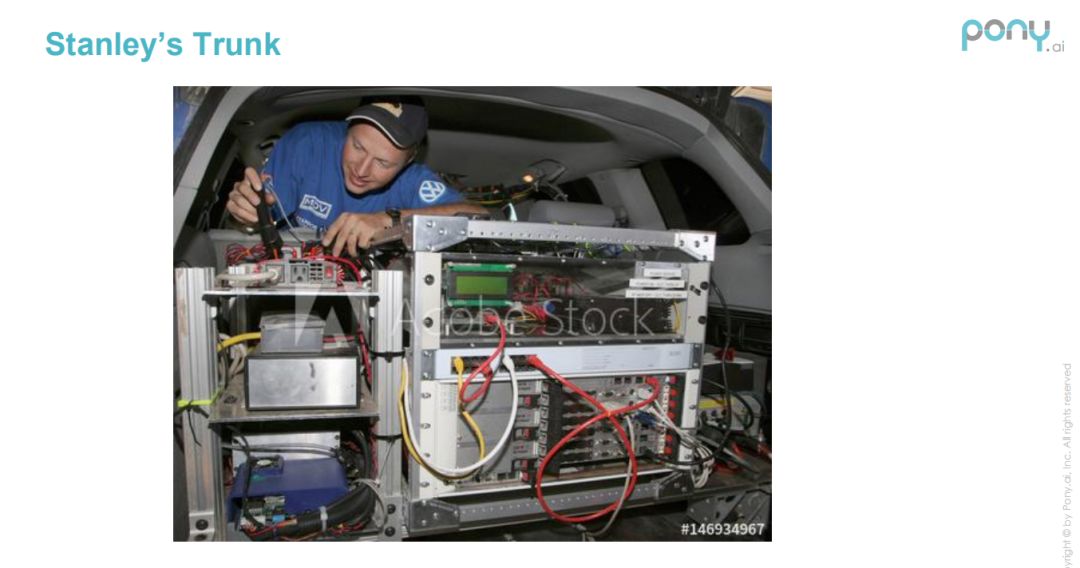
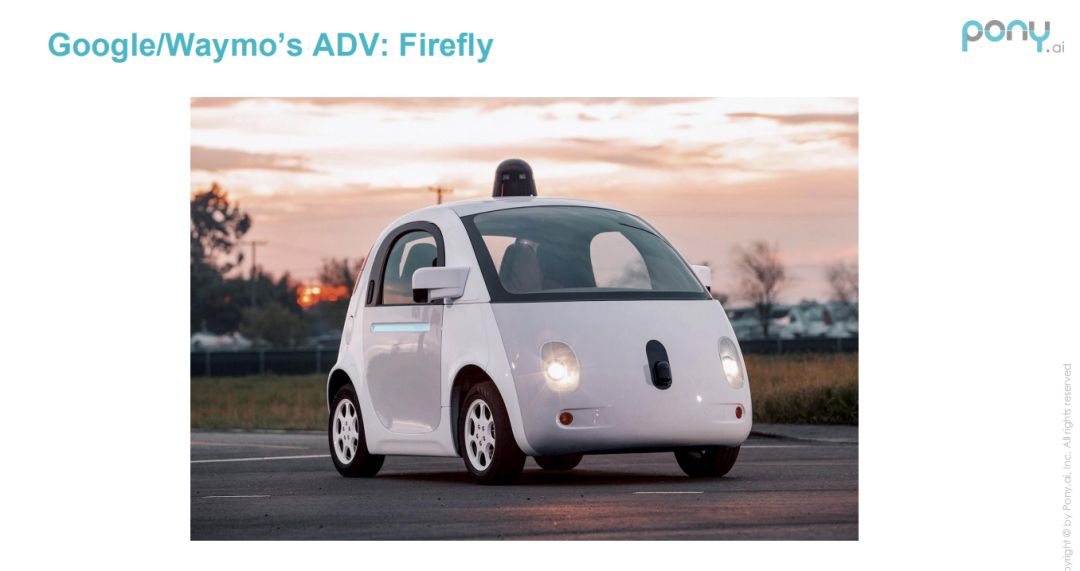
这是Sebastian Thrun当时在无人车后备箱工作的一张图片,这些大大小小的设备体现了自动驾驶对于计算能力和信号处理的需求。Sebastian团队另外一大贡献就是在完成挑战赛后,发表了一篇著名的paper(论文)《Stanley: The Robot that Won the DARPA Grand Challenge》,我相信几乎每位自动驾驶的从业者都看过这篇paper。2007年,DARPA举办了另一种路况的挑战赛——在城市的道路中完成自动驾驶。最后,这场比赛的冠军由来自卡内基梅隆大学的团队摘得,他们的无人车使用的激光雷达传感器变成了Velodyne。自动驾驶行业发展到今天,我们会发现世界做自动驾驶主流的人才很多都来自这些高校。了解了自动驾驶简单背景,接下来,我们可以看看不同公司制造的自动驾驶汽车。这是Google(Waymo)早期的一辆自动驾驶车,它的顶部采用的传感器也是来自Velodyne。这是Google在2014至2017年间制造的一辆真正的“无人车”——Firefly(萤火虫),它没有驾驶舱和方向盘,但是由于当时实现真正“无人”的困难,所以Google后来就不使用了这款车型了。上图则是Google现在的自动驾驶车,他们的硬件技术思路是,硬件系统和软件系统都自主完成。其中硬件部分包含传感器、计算平台、信号方案、供电等等,都是Google自主定制的。综合自动驾驶车外形变化历史来看,普通车和自动驾驶车最大的区别就是自动驾驶车上装载了各种各样的传感器。一辆自动驾驶车辆(Autonomous Driving Vehicle, ADV) 一般都配有以下这些传感器:Lidar 激光雷达, Video Cameras 相机, GNSS/IMU 定位系统。相机大家都见过,我就不介绍了。下面我简单说一下Lidar和GNSS/IMU这两种传感器。
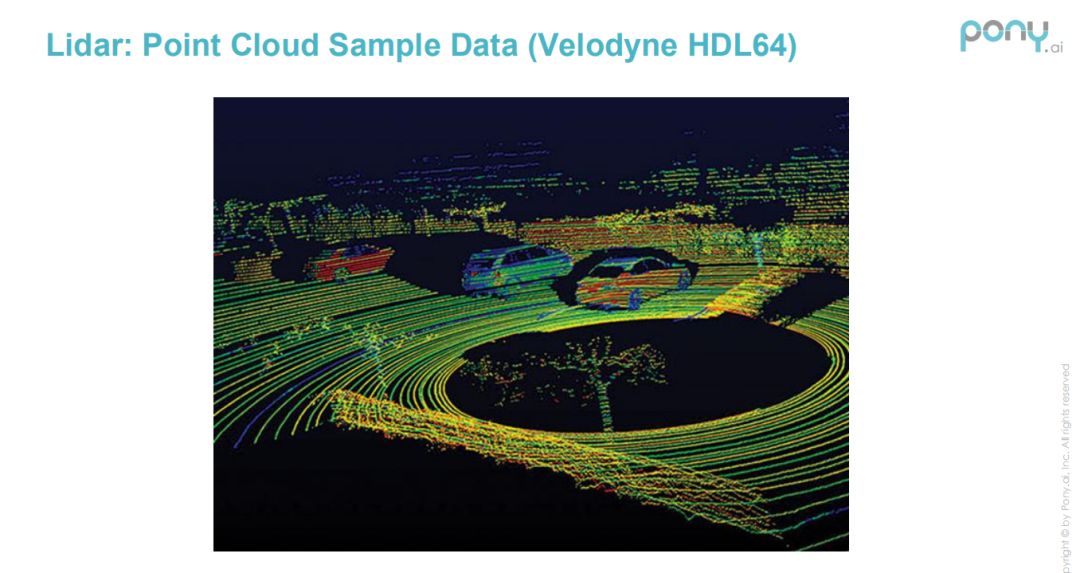
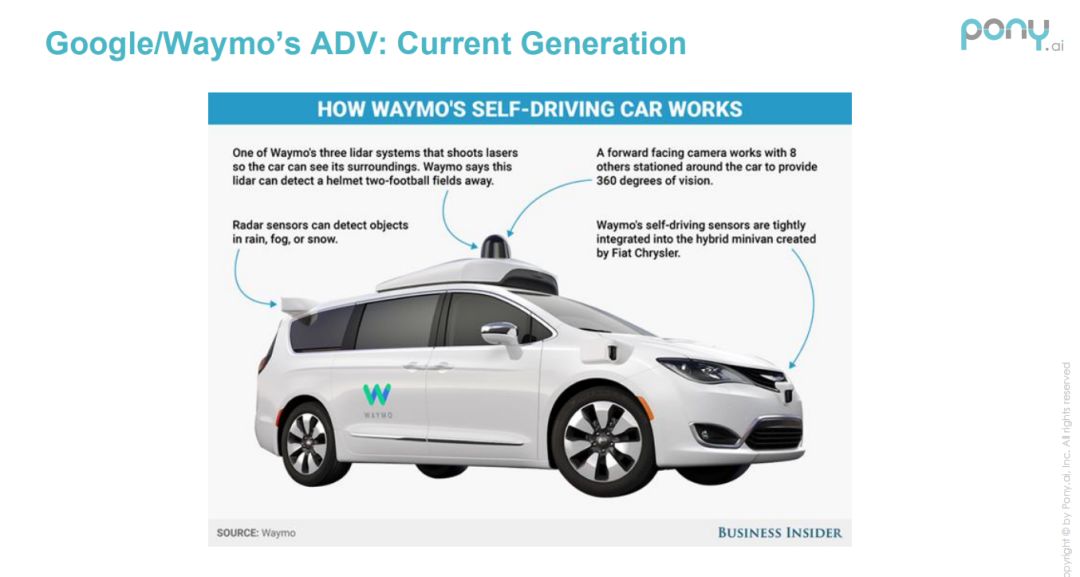
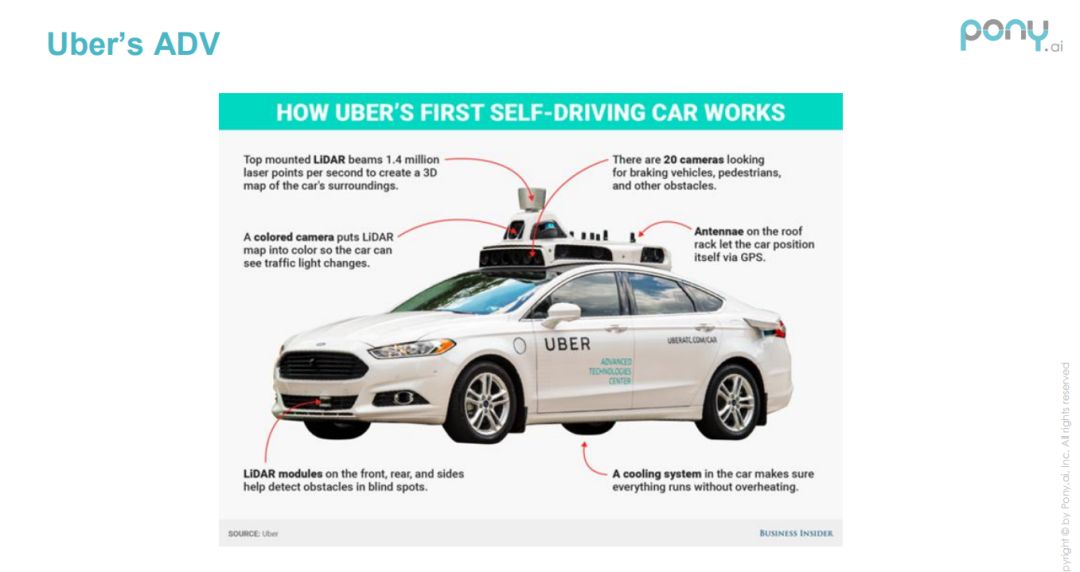
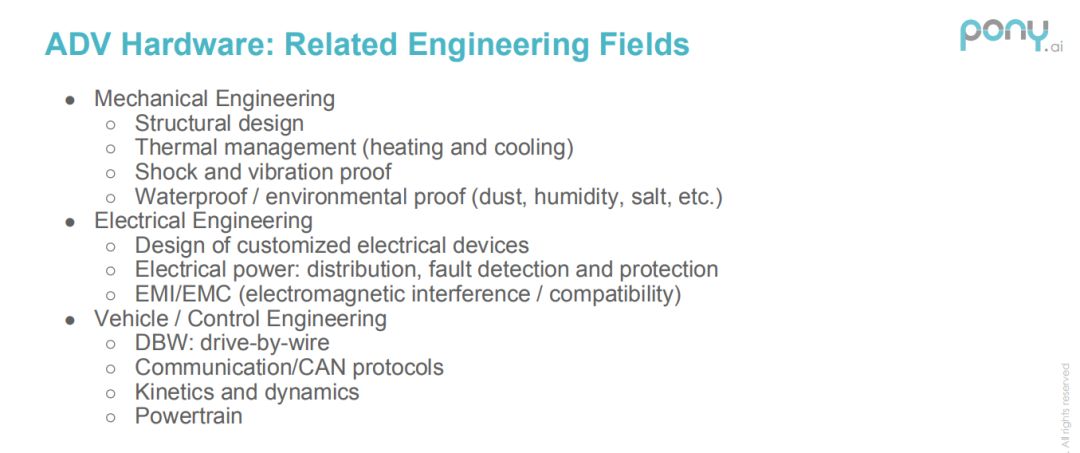
激光雷达(Lidar)是做自动驾驶必备的传感器,上图展示了Velodyne HDL64 扫描的结果。这是一款机械式激光雷达,总共会有64条扫描线,它具备测量精确距离的能力。比较常用的GNSS卫星导航定位系统包括:GPS、BeiDou、Galileo、GLONASS,由于GNSS更新速率较慢,单独使用无法满足要求,所以还需要有IMU(惯性测量单元)支持,它的更新速率较快。GNSS和IMU结合,可以满足自动驾驶要求。至于计算平台,根据计算量的不同,计算平台的复杂程度也各不相同。另外,越复杂的计算平台耗电量越大,所以也需要安装散热系统。下面两幅图,分别展示了Google和Uber自动驾驶车辆所采用的传感器等硬件设备,包含激光雷达、相机、毫米波雷达、散热系统等。正如前面所说,一辆实现L4级自动驾驶功能的无人车无法离不开硬件技术的支持。也因此,自动驾驶是一项系统工程,除了出色的软件系统,也需要关注硬件设备在机械方面和电子方面的要求和挑战。首先是自动驾驶车的“颜值”,这是人们在视觉上最直接的反馈。如果一辆车的外观不够吸引人和赏心悦目,它在市场上就可能缺乏竞争力。其次,传感器的增加需要满足尺寸和重量的限制。例如,绝大多数地下停车场限高2.2m,这就要求车顶加装雷达后的车辆高度最好不要超过2.2米。绝大多数车顶承重不能超过50-60公斤,以及后备箱空间也有限制等等。第三,温度范围也有要求。因为车内温度的变化比较大,所以对车载电子设备的温度适应能力要求比较高。在仪表盘上使用的设备温度要求范围是-40摄氏度到+90摄氏度,而在发动机舱内的要求是-40摄氏度到+125摄氏度。第四,热量管理。这既包括散热问题,也要考虑严寒天气的适应能力和另外加热的问题。第五,冲击和振动。车辆在行驶的过程中,免不了会产生的或弱或强的冲击和振动,这也成为硬件技术需要解决的任务。最后一点,防水与环境防护。自动驾驶对精度和敏感度的要求极高,这也要求硬件团队能够针对各种类型天气和环境采取相应的解决方案,提高应对能力,以达到安全和稳定性的要求。◆ 雾霾(激光雷达对PM10,即10微米以下的颗粒物非常敏感。)◆ 高原(海拔越高,空气越稀薄,硬件散热能力随之下降。)◆ 盐的腐蚀性(例如海滨城市内吹拂的海风中往往含有盐份,并具有腐蚀性。)自动驾驶采用的硬件设备在电子方面也有许多注意事项和要求。首先,温度条件。基于硬件设备类型,一般可以分为五种温度要求:其次,应对恶劣的环境,包括冲击、振动、防水、自然环境等。第三,供电能力有限的挑战。绝大部分车辆的供电功率少于1KW,好一点的车型可以做到1.5KW,除非像Waymo一样自己改造供电,可以做到3KW供电能力。最后,恶劣的电磁环境的挑战。这种环境下,自动驾驶的硬件技术需要做好抗干扰。前面也提到过,自动驾驶是一项系统工程。除了与感知、地图、定位、规划与控制有关的软件模块,了解与自动驾驶有关的工程领域,能更好帮助从业者认识这个行业。- Vehicle Kinetics and Dynamics(车辆运动学和动力学)
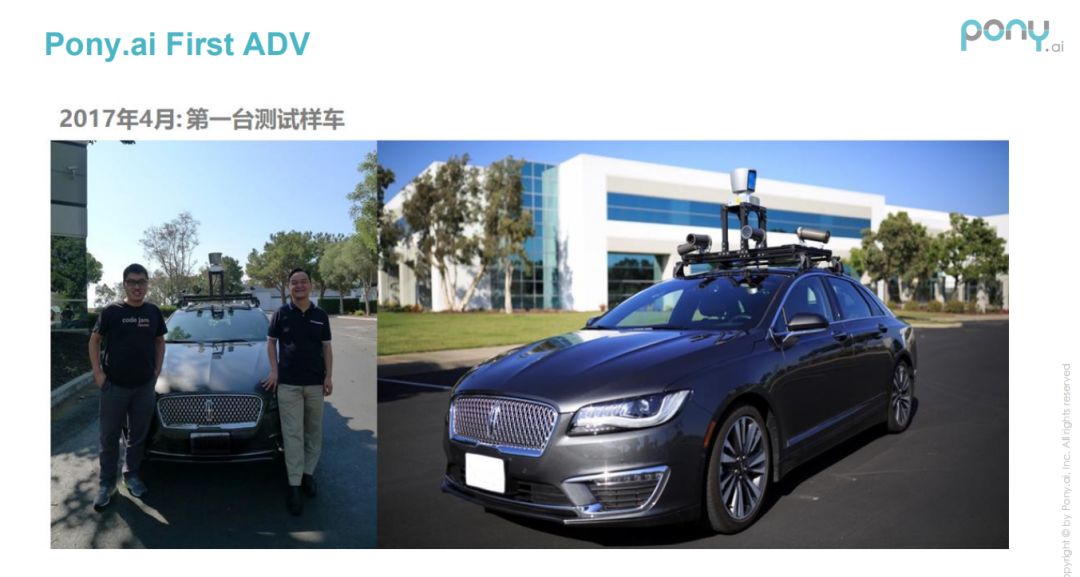
了解了整个自动驾驶硬件技术的背景和挑战,这一部分我想为大家介绍小马智行研发的自动驾驶系统和硬件平台。
2017年4月,小马智行打造了第一台自动驾驶测试车(上图),第一代硬件平台采用的传感器包括了Velodyne HDL64的激光雷达。照片里站在车旁的分别为小马智行两位联合创始人CEO彭军(右)和CTO楼天城(左)。第二代平台采用了32线激光雷达,传感器的体积明显缩小。第三代方案则是去年9月在世界人工智能大会上发布的PonyAlpha。在近三年的时间里(编者注:该场技术演讲发生在7月6日),Pony已经在三种不同的车型上搭载小马智行自动驾驶软硬件平台,分别包括上图左侧的广汽传祺电动车、中间林肯MKZ、右侧的比亚迪秦(编者注:今年8、9、10月,小马智行分别宣布在丰田雷克萨斯RX、广汽Aion LX和现代Kona SUV搭载了小马智行自动驾驶软硬件方案)。PonyAlpha硬件平台有三个组成部分:车顶模块,后备箱模块和毫米波雷达。
毫米波雷达部分相对比较简单,这里就不介绍了。先说第一个组成部分:车顶模块。车顶安装了许多传感器,主要负责解决自动驾驶的感知问题。我们要求传感器(感知系统)的覆盖范围为360°全景,并且长距离(200m),因此采用了6个相机,包括广角和中长焦相机。另外还有3个激光雷达(探测距离在100m~200m)。从左前方向的视角观察硬件平台:顶部的柱体是32线主激光雷达,16线激光雷达放在侧面,正前方采用三个摄像头,左侧面安装了一个摄像头。这是左后方的视角:安装了GPS天线,有朝后看的摄像头,也可以看到32线主激光雷达。◆ 传感器,包括3个激光雷达、6个摄像头和GNSS/IMU;◆ 车顶外壳起到了装饰罩的作用,也改善了空气动力学性能,并为传感器提供保护。硬件平台第二组成部分则是后备箱模块。后备箱模块一般包含以下子功能:
第一是车辆集成硬件,包括PDS(Power Distribution System配电系统)和直流/直流转换器。
第二是计算堆栈,包括硬盘、计算单元(CPU、GPU和FPGA)和传感器接口。
第三是通信设备,包括4G/5G路由器、网络交换机、以及和车辆通信的接口。关于自动驾驶硬件技术的分享到了这里,最后做一个总结。自动驾驶技术研发确会面临许多硬件挑战,从机械类(结构、热、冲击/振动、环境)到电气(温度范围宽、恶劣环境、功率有限)再到安全第一的目标。也因此这个行业需要许多硬件工程师投入其中,解决这些挑战,比如机械工程师,电气工程师,控制工程师,嵌入式软件工程师,传感器工程师(ISP、摄像头、激光雷达、雷达、GNSS/IMU)等。
本文部分内容来源:无人汽车情报局、智车科技等,转载请注明来源,非常感谢!
懂智驾,更懂未来
公众号 : 智驾未来
ID:gsi24-Auto


















发表评论 取消回复